





| |
フーコー振り子 | |
ジャイロホイール | |
トムソンリング | |
まぼろしの壁 | |
回折 | |
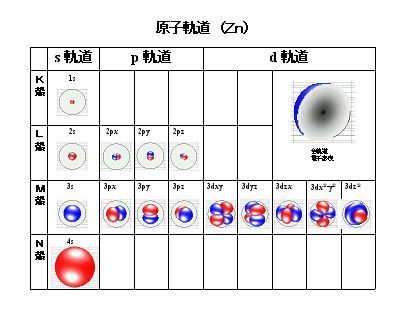
電子雲 | |
月の軌道 | |
HR図 | |
霧箱・サイクロトロン | |
一般相対性理論概要 | |
素粒子標準理論概要 |
| [概説] | 数学・リーマン幾何学・測地線方程式 | 物理・ローレンツ変換・重力場方程式・ニュートン近似 | [適用例] | ブラックホール・宇宙膨張 | 国立科学博物館で学ぶ物理学 ホーム |
アインシュタイン方程式とは、次式で表されるものである。(下式右のような表現もあるが、この場合は、Rμνの定義が異なりRμνの符号が逆である)
このように、式は、テンソル形式で書かれており、反変・共変を表す上下の添え字やアインシュタイン規約という特殊な数式表現を多用するため、
この入口で早々と躓いてしまうことが多い。そこで、ここでは、アインシュタイン方程式の見方・読み方を中心として、
その成り立ちを簡単に説明することにしたい。
アインシュタイン方程式の物理的意味は、左辺が空間のゆがみ(曲率)を表し、右辺は物質などのエネルギーの分布を表しており、エネルギー(物質を含む)が あれば空間がゆがむという単純明快なものである。3次元空間のゆがみとは、4次元空間の曲面の性質(曲率)のことであるため、曲面の幾何学 を扱うリーマン幾何学を援用する必要が生じ、そのため複雑な数学的表現を理解しなければならないということになる。
一般相対性理論の基礎的な事項は、このサイトを読んでいただければ理解できると思いますが、空間を規定する計量テンソル(シュワルツシルト計量
・ロバートソンウォーカー計量)の誘導、その応用としての光の湾曲・水星近日点移動・宇宙年齢(フリードマン方程式)などについては、
[一般相対性理論/ブラックホール・宇宙年齢]を見てください。
(a)計量テンソル gμν(反変・共変、アインシュタイン規約、線素)
簡単のため2次元での斜交座標基本ベクトル(e1,e2)に対し、ベクトルrが、
と表されるとする。(上付の添え字は、べき乗の意味ではなく、単に1番2番という意味である。以下に出てくるリーマン幾何学では
上付の添え字と下付の添え字を区別し、慣例により、上付の添え字を反変ベクトル、下付の添え字を共変ベクトルという。)
ベクトルrの長さは、その内積をとり、
デカルト座標であれば、基本ベクトルの大きさは1であり、それぞれ直角であるから、ei・ej=δij(クロネッカーデルタ)となり、
しかし今は斜交座標を考えているので、ei・ej=gij(≠0,1)となる。この記号
を使うと、
となる。このgijを計量テンソルという。(テンソルとは、簡単に言えば、添え字の数が0の場合を0階テンソルと言い、
スカラー量がこれに当たる。添え字が1つの場合を1階テンソルと言い、ベクトルがこれに当たる。添え字が2つの場合を2階テンソルと言い、行列で表現できる。
また添え字が3つ以上(p個)であればp階テンソルと言い、添え字は上[反変テンソル]であったり下[共変テンソル]であったり上下[混合テンソル]ともであったりする。)
以上のことを多次元に拡張し、Σを省略(この数学的表現をアインシュタイン規約と言う。)すると、内積r2および計量テンソルgij
は次のようになる。
一般的に、アインシュタイン規約では、同じ添え字が上と下にある場合にその添え字についてすべての和をとるという約束となっている。
(添え字をギリシャ文字で表す場合は和をとり、ローマ文字で表す場合は、和はとらないとして区別する場合もある。)
最初のベクトルを微小ベクトルdrで表現すると、
内積dr・drは、ベクトルrとベクトルr'=r+drの間の距離の2乗であり、ds2と表し、
このds2を線素という。
自然基底{eμ}に対して共変計量テンソルgμνが定義されたように、双対基底{eμ}
(eμ・eν=δμνで定義される)に対し、反変計量テンソルgμνも定義でき、
更に混合計量テンソルgμνも次のように定義できる。
数式ばかりでイメージし難いので、計量テンソルの例を示しておこう。 例えば、3次元デカルト座標の場合、x1 = x、x2 = y、x3 = zとすると、
球座標の場合、x1 = r、x2 = θ、x3 = φとすると、
(b)座標変換と反変ベクトル・共変ベクトル
座標変換に当たって、元の座標の自然基底を{eμ}、新しい座標のそれを{e'ν}として、
新しい座標での全微分dx'νを元の座標に対して求めると、
逆に、元の座標での全微分dxμは、
ベクトルrそのものの大きさは、元の座標でも新しい座標でも同じであるから、
従って、{eμ}と{e'μ}の関係は、dx'νの基底を比較して
<新基底生成関係>

この関係式は、基底ベクトルの座標変換を意味するのではなく、新しい座標系の基底ベクトルの生成関係を示している。
任意のベクトルAがあって、元の座標での成分(Aμ)が、自然基底の生成関係とは逆の関係で、新しい座標での成分に変換される場合、
この成分は、基底ベクトルの生成関係と反対の関係により変換されるという意味で反変成分という。慣例により、成分のことであっても、反変ベクトルといい上付添え字で表す。
また、元の座標での成分(Aμ)が、自然基底の生成関係に従って、新しい座標での成分に変換され場合、
この成分は、基底ベクトルの生成関係と同じ関係により変換されるという意味で共変ベクトルという。共変ベクトルは下付添え字で表す。
<反変ベクトル> (位置 x、速度 dx/dt など)
) <共変ベクトル> (電場 dφ/dx、関数の勾配 df/dx など)
<共変ベクトル> (電場 dφ/dx、関数の勾配 df/dx など)
)
これらのベクトルは、自然基底eμ及び双対基底eμを用いて上式右側( )内のように表される。
(c)テンソル Tμν
ここでは、2階テンソルを中心に、テンソルの極く大雑把な説明をしよう。テンソルは、2つのベクトルuとvがあって、
ベクトルa→u(v・a)の線形変換を与えるものをテンソルといい、
で表され、Tをuとvのテンソル積という。その成分は、u=u(uμ)、v=v(vμ)として、
上付の反変ベクトルである速度を2つ使っているので、この場合のテンソルは上付の反変テンソルTμνとなる。
具体例として、角運動量Lと角速度ωの関係式 L=Iωについて説明しよう。
=\int\:\rho dV\{\bf r\rm\times(\bf \omega\rm\times\bf r\rm)\})
=(\bf r\rm\cdot\bf r\rm)\bf \omega\rm-(\bf r\rm\cdot\bf \omega\rm)\bf r\rm) 第2項は、上に述べた変換でいえば、ω→u(v・ω)であるから、
第2項は、上に述べた変換でいえば、ω→u(v・ω)であるから、
\bf r\rm=T\cdot\bf \omega\rm=(\bf r\rm\otimes\bf r\rm)\bf \omega\rm) 従い、第1項はr2ωであるから、単位テンソル(単位行列)Eを使って r2Eωと書ける。r=r(x,y,z)とすると、r2=x2+y2+z2も考慮して、
従い、第1項はr2ωであるから、単位テンソル(単位行列)Eを使って r2Eωと書ける。r=r(x,y,z)とすると、r2=x2+y2+z2も考慮して、
=\{r^2E-(\bf r\rm\otimes\bf r\rm)\}\bf \omega\rm)
) これを使えば、よく知られた慣性モーメント(慣性テンソル)I の積分公式(ex. Ixx=∫ρ(y^2+z^2)dVが得られる。
アインシュタイン規約の表現を用いれば、次のようなテンソルとなる。
これを使えば、よく知られた慣性モーメント(慣性テンソル)I の積分公式(ex. Ixx=∫ρ(y^2+z^2)dVが得られる。
アインシュタイン規約の表現を用いれば、次のようなテンソルとなる。

反変ベクトルA=ΣAμeμがあって、その微分∇Aで作られるテンソルの場合、∇はベクトルと見なせて、
なお、2階テンソルを行列表示する場合は、上付添え字であろうと下付添え字であろうと、左側の添え字が行を、右側の添え字が列を表す。
従い、次のようなテンソルの積は、行列計算では、行列Sは行と列を入れ替えなければならない。
テンソルに関し、以下に示す3つの量は全ての座標に対して不変である。
更に、テンソルは、座標変換に対して不変である。
<補足説明> 上でテンソルの定義を書いたが、自然基底を使うと、
) とも書かれ、これを使うと、
とも書かれ、これを使うと、
\otimes(\frac{\partial u'^{\beta}}{\partial u^{\nu}}\bf e'\rm_{\beta}))
\bf e'\rm_{\alpha}\otimes\bf e'\rm_{\beta})
 このように変換先でも同じ形で表現される。つまり、テンソルは座標変換に対し不変の量となる。
このように変換先でも同じ形で表現される。つまり、テンソルは座標変換に対し不変の量となる。
スカラー、ベクトルもテンソルであるから座標変換に対し不変である。後述のローレンツ変換は座標変換であるから、物理法則をテンソル
で表せば、ローレンツ変換を行っても、同じ形の法則として表される。(重要)
(d)計量テンソルgμνに関する諸公式
計量テンソルに関する公式を、今後のために整理しておこう。( 自然基底 : {eμ}、双対基底 : {eμ}、両基底関係 : eμ・eν=δμν)
計量テンソルは対称テンソルである。
共変計量テンソル・反変計量テンソルは互いに逆行列の関係<g=det(gμν)>にある。
共変・反変・混合テンソルは計量テンソルを用いて互いに変換できる。
ベクトルの内積は、共変ベクトルと反変ベクトルの積で表すことができる。
デカルト座標(x,y,z)が変数u1,u2,u3の関数x(u1,u2,u3),y(u1,u2,u3),z(u1,u2,u3)
である場合、計量テンソルは次式で求めることができる。
老婆心ながら、デカルト座標(x,y,z)が変数u1,u2の関数の場合は、以下の式となる。
\hspace{5mm}g_{11}=(\frac{\partial x}{\partial u_1})^2%2B(\frac{\partial y}{\partial u_1})^2%2B(\frac{\partial z}{\partial u_1})^2)
\hspace{5mm}g_{12}=(\frac{\partial x}{\partial u_1})(\frac{\partial x}{\partial u_2})%2B(\frac{\partial y}{\partial u_1})(\frac{\partial y}{\partial u_2}))
(\frac{\partial z}{\partial u_2}))
\hspace{5mm}g_{22}=(\frac{\partial x}{\partial u_2})^2%2B(\frac{\partial y}{\partial u_2})^2%2B(\frac{\partial z}{\partial u_2})^2) 例えば、3次元球面(x,y,z:半径a)を直交曲線座標(u1,u2)=(θ,φ)で見る場合、x = a sinθcosφ、y = a sinθsinφ、
z = a cos θ であるから、
例えば、3次元球面(x,y,z:半径a)を直交曲線座標(u1,u2)=(θ,φ)で見る場合、x = a sinθcosφ、y = a sinθsinφ、
z = a cos θ であるから、

(-a\sin\theta\sin\phi)%2B(a\cos\theta\sin\phi)(a\sin\theta\cos\phi)-a\sin\theta\cdot 0=0)

 と計算されるので、次々項(f)の公式を使えばクリストフェル記号も計算され、以下のものだけが残る。
と計算されるので、次々項(f)の公式を使えばクリストフェル記号も計算され、以下のものだけが残る。
 従い、後述の測地線の方程式を書き下すことができ、それを解く( W = cotθとすれば W の微分方程式として解ける)か
数値計算を実行すれば、球面の測地線が大円( cosθ= C1 cosφ+ C2 sinφ)となることを示すことができる。
従い、後述の測地線の方程式を書き下すことができ、それを解く( W = cotθとすれば W の微分方程式として解ける)か
数値計算を実行すれば、球面の測地線が大円( cosθ= C1 cosφ+ C2 sinφ)となることを示すことができる。
(e)クリストフェル記号 Γλμν

曲線座標uμの各点rでの接線ベクトルtμ=∂r/∂uμと、その基本ベクトルetμの関係は、
であるが、接線ベクトルの微分は、接線ベクトルの1次式で表され、
と置くと、Γλμνは、次のようになる。これをクリスフェル記号という。
★この式は、gμν=eμ・eνをuλで微分した式と、∂tν/∂uμ=Γλμνtλの式とから誘導することができる。
★ここに示したクリストフェル記号は、テンソルと間違いやすいため、次のように表されることもある。

★具体例を示しておこう。デカルト座標(x,yz){基本ベクトル(i,j,k)}を球座標ie曲線直交座標(r,θ,φ)
{接線ベクトル(t1,t2,t3)}とすると、u1=r、u2=θ、u3=φと置いて、r=xi+yj+zk(x=rsinθcosφ、y=rsinθsinφ、y=rcosθ)ゆえ
\bf i\rm %2B(\sin\theta\sin\phi)\bf j\rm %2B(\cos\theta)\bf k\rm )
\bf i\rm %2B(r\cos\theta\sin\phi)\bf j\rm -(r\sin\theta)\bf k\rm )
\bf i\rm %2B(r\sin\theta\cos\phi)\bf j\rm ) これらが各曲線Cμの接線ベクトルとなっていることは、例えば、θ=π/2、φ=0 の点で計算して、
t1 = i、t2= -rk、t3 = rjであることから理解できよう。また、|tμ|≠1 も分かろう。
{基本ベクトル(i,j,k)}を{接線ベクトル(t1,t2,t3)}で表すと
これらが各曲線Cμの接線ベクトルとなっていることは、例えば、θ=π/2、φ=0 の点で計算して、
t1 = i、t2= -rk、t3 = rjであることから理解できよう。また、|tμ|≠1 も分かろう。
{基本ベクトル(i,j,k)}を{接線ベクトル(t1,t2,t3)}で表すと
\bf t\rm_1 %2B(\cos\theta\cos\phi/r)\bf t\rm_2 -(\sin\phi/\sin\theta/r)\bf t\rm_3 )
\bf t\rm_1 %2B(\cos\theta\sin\phi/r)\bf t\rm_2%2B(\cos\phi/\sin\theta/r)\bf t\rm_3 )
\bf t\rm_1 -(\sin\theta/r)\bf t\rm_2 ) 例えば、 接線ベクトルt1を微分して、上で求めた{基本ベクトル(i,j,k)}を代入すると、
例えば、 接線ベクトルt1を微分して、上で求めた{基本ベクトル(i,j,k)}を代入すると、


\bf i\rm %2B(\cos\theta\sin\phi)\bf j\rm -(\sin\theta)\bf k\rm )
\bf t\rm_2 %2B0\bf t\rm_3=\Gamma^{1}_{12}\bf t\rm_1 %2B\Gamma^{2}_{12}\bf t\rm_2 %2B\Gamma^{3}_{12}\bf t\rm_3)
 このようにしてクリストフェル記号が計算されるが、次項(d)の関係を使うとより簡単に計算できる。
このようにしてクリストフェル記号が計算されるが、次項(d)の関係を使うとより簡単に計算できる。
(f)クリストフェル記号と計量テンソルの関係
クリストフェル記号は、下記式で i,j に関し対称である。
計量テンソルからクリストフェル記号を求めるには、(c)で示した式で計算しなければならないが、uλが直交曲線座標の場合は、以下の式で簡単に計算することができる。
(添え字がローマ文字で表わされている場合は、和はとらないをとらないことに注意)
具体例を示しておこう。球座標(r,θ,φ)では、(a)項で示したように g22 = r2であったから、
上の公式(9)を使って、以下の通り簡単に求まる。この値は前項(c)で例示したものとなっている。

<重要な定理> ★ 直交座標(ie一つ次元の高い空間での平坦な曲面(平面))ではクリストフェル記号は常に0である。
(g)共変微分(絶対微分)と曲率テンソル Rλσμν ・ リッチテンソル Rμν ・ リッチスカラー R
曲線座標系uλのベクトル場vの単純微分はテンソルではないため、次のような共変微分と呼ばれる微分を導入する。
こうして定義された共変微分はテンソルとなる。

共変ベクトル(下付き添え字)に対する共変微分は、
2階テンソルの共変微分は、
共変微分は、分配法則など通常の微分と同じ手順が使える。
計量テンソルの共変微分は常に0となる。
ベクトル場vの2階共変微分を用いて計算すると、次のように表される。
Rλσμνをリーマンの曲率テンソルという。曲率テンソルは、曲面座標上で測地線
に沿って別経路で平行移動した2つのベクトルの差を表す。すなわち曲面の曲率を与える量である。
曲率テンソルは、クリストフェル記号を用いると、
<参考>曲率テンソルは、以下の性質を持つ。



2個の添え字で縮約して(1,3)テンソルから(0,2)テンソルとしたRμνをリッチテンソルという。
<参考>リッチテンソルは、定義が異なれば符号は逆となる。
 リッチテンソルは対称である。
リッチテンソルは対称である。

計量テンソルとの積をリッチスカラーといい、次式で定義される。
<重要な定理> ★ 平坦な曲面(平面)では曲率テンソルは常に0である。
★ 平坦な曲面(平面)ではクリストフェル記号は常に0であるので、共変微分は通常の微分と同じである。
(h)測地線方程式
測地線とは、2点間を結ぶ最短経路のことである。(厳密には極値となる経路であるので、最短以外の経路を表すこともある。)
純粋数学的には、Dμ=duμ/dσ(σは任意のパラメーターで、曲線弧長sでも、時間τでもよい)と置き、
共変化微分を用いると、測地線方程式の条件は ∇DDμ = 0 であるから、変形すると、
従い、測地線方程式は、以下の式となる。パラメータσが任意であることは既に述べた。
これでは、幾何学的な関係が分かりにくいので、参考までに以下に3次元空間での測地線方程式がどのように導かれるかを簡単に紹介しておこう。
曲面r=r(u1,u1)上の曲線u1=u1(s),u2=u2(s)
(s:曲線上の弧長)については、曲面の法線をnとして、次式が成立する。
^2%2B2K(\frac{du^1}{ds}\frac{du^2}{ds})%2BN(\frac{du^2}{ds})^2\}\bf n\rm) ここに、共変微分は、
ここに、共変微分は、

 この式は次のようにして導出される。接線ベクトルに関し
この式は次のようにして導出される。接線ベクトルに関し
 )
 このt1,t2,nは、共面ベクトルでないので、
このt1,t2,nは、共面ベクトルでないので、
 とおいて、これらの式に、t1,t2,nを掛けてt1・n=t2・n=0、t1・t2=0などを考慮して、
係数a,b,cを求め、それらを上の式に代入すると、
とおいて、これらの式に、t1,t2,nを掛けてt1・n=t2・n=0、t1・t2=0などを考慮して、
係数a,b,cを求め、それらを上の式に代入すると、
}{|\bf t\rm_1\times\bf t\rm_2|}\bf t\rm_1)
}{|\bf t\rm_1\times\bf t\rm_2|}\bf t\rm_2%2B(\bf n\rm\cdot\bf t\rm_{ij})\bf n\rm) ここに、t1=h1et1、t2=h21et2、et1×et2=n等の関係と、クストフェル記号の定義∂th/∂s=ΣΓhijthを使うと、
ここに、t1=h1et1、t2=h21et2、et1×et2=n等の関係と、クストフェル記号の定義∂th/∂s=ΣΓhijthを使うと、
}{|\bf t\rm_1\times\bf t\rm_2|}\bf t\rm_1}=\frac{\frac{\partial \bf t\rm_i}{\partial u^j}\cdot (h_1h_2\bf t\rm_1)}{h_1h_2})
 となるので、L=nt11、M=nt12、N=nt22と置けばtijが得られ、これを微分すれば、最終的に、冒頭の式を得る。
曲面上の曲線がその測地線であることの必要十分条件は、この曲線の主法線nc=r" (sの2回微分を " で表す)
が常に曲面に垂直であること、すなわちncとnは平行である(別の表現では、r"の接平面への射影で得られる
曲線の曲率すなわち測地的曲率が常に0でなければならない)から、
となるので、L=nt11、M=nt12、N=nt22と置けばtijが得られ、これを微分すれば、最終的に、冒頭の式を得る。
曲面上の曲線がその測地線であることの必要十分条件は、この曲線の主法線nc=r" (sの2回微分を " で表す)
が常に曲面に垂直であること、すなわちncとnは平行である(別の表現では、r"の接平面への射影で得られる
曲線の曲率すなわち測地的曲率が常に0でなければならない)から、
 これが常に0ということは、各接線ベクトルの成分が0でなければならない。従い、測地線方程式は、以下の
通りとなる。
これが常に0ということは、各接線ベクトルの成分が0でなければならない。従い、測地線方程式は、以下の
通りとなる。


(a)相対性理論とミンコウスキー空間
相対性理論には、特殊相対性理論と一般相対性理論とがあるが、それぞれの基本原則は以下の通りである。
<特殊相対性理論> ① 速度不変の原理 : 光速度は、光源の運動にも観測者の運動にもよらず一定である。
② 相対性原理 : 自然の法則はすべての慣性系に対して同じである。
<一般相対性理論> ① 等価原理 : 慣性質量と重力質量は本来同一のもので加速度によって生じる
見かけの力(慣性力)と重力は原理的に区別できない。
② 一般相対性原理 : すべての物理法則は慣性系に限らず加速度系を含む任意の座標系
に対して同じ形で表される。
特殊相対性理論について簡単に説明しておこう。静止座標系(x,y,z)に対してx方向に一定速度Vで移動する慣性系座標(x',y',z')を考えると、
所で、上式のx'、y'、z'の各2乗とt'の2乗との差をとると、
すなわち、ローレンツ変換により不変な量は、空間的距離の2乗と時間的距離の2乗の差といえる。そこで、この4次元時空の線素を、
と定義すると、線素は不変量となる。この計量テンソルで表される時空を特にミンコウスキー空間ともいう。
(ミンコウスキー空間での計量テンソルは慣例により ημνと書かれる)
このような時空で ds2=0 を考えると、それぞれの慣性系固有の時間と距離により計算される光速は同じになる。すなわち
光速不変の原理が満足されていることになる。
これまでは、いわゆる空間の曲面の問題(μ= 1~3)として説明をしてきたが、一般性相対論を時間軸を含む4次元時空空間の問題(μ= 0~3)として考える場合には、
上記の計量テンソル使えば、前節で説明したリーマン幾何学の諸式がそのまま使える。
(4次元時空では、上のミンコウスキー空間の例でも示したように、gμνの行列式 g は負となることに注意してほしい。)
慣性系での時間は静止系での時間 t よりゆっくり進み、慣性系の長さは静止系での長さより縮んで見えるが、この慣性系での時間を固有時間 τ といい、 静止系での時間 t との関係は以下の通りである。(光速で移動する慣性系での固有時間は0、すなわち時間は進まない)
(b)アインシュタインテンソル
アインシュタインテンソルは、曲率テンソルから純然たる数学的演算で導かれるが複雑なので、変分法を用いて説明した方がその式が出てくる
ことが理解しやすい。ただ、今述べた純然たる数学的演算に帰結だけは先に書いておこう。すなわちアインシュタインテンソルの共変微分は常に0である。
<変分原理によるアインシュタインテンソルの導出>
解析力学によれば、質点運動経路は作用積分(または単に作用とも呼ばれる。或いはまた仮想仕事ともいわれる。)Sを最小にする(停留する)ように決まる。すなわち、
qは一般座標であり、Lをラグランジアンという。δS=0が成立するためには、
これはオイラー・ラグランジュ方程式と呼ばれる運動方程式となる。上の数式右に記す質点の運動エネルギーT、重力場のポテンシャルエネルギーUの場合、qをzで表すと、
オイラー・ラグランジュ方程式から、ニュートンの運動方程式 md2z/dt2=F=-dU/dz(=-mg)が導かれる。
相対性理論に関わる解析では、ラグランジアン密度
物理的には、空間のひずみはその空間に分布するエネルギー すなわちエネルギー運動量テンソル Tμνで決まると考えるので、
アインシュタインテンソルGμνは、以下の式のようにエネルギー運動量テンソル Tμνに等しいと置かれる。κは左辺・右辺の次元合わせの係数である。
これがアインシュタイン方程式と呼ばれるものである。説明は省略するがテンソルの共変微分∇μTμν=0であるので、上記の∇μGμν=0
と整合性が取れている。
尚、上式右側( )内に示したものもアインシュタイン方程式と呼ばれるが、これは、アインシュタインが宇宙は膨張も収縮もしない静止宇宙であるべきと
考え数式的根拠はないが追加したもので、Λは宇宙項と呼ばれる。しかし、宇宙膨張のハッブルによる発見後、「人生最大の失敗」としてこれを撤回したことは有名
な話である。ところが、現在の宇宙論ではこの宇宙項が重要な役割を果たしている。(詳細は[一般相対性理論/ブラックホール・
光の湾曲・水星近日点移動・宇宙膨張]を参照されたい。)
計量テンソルを使うと種々変形した方程式が得られるが、一つの例を示しておこう。
この式は次のようにして導出される。元の式の両辺にgμνを掛けると、
 ところが、逆行列の関係(gμν)=(gμν)-1を考慮して、
ところが、逆行列の関係(gμν)=(gμν)-1を考慮して、
 であるから、
であるから、
 これをもとの式に代入すれば変形の方程式が得られる。
これをもとの式に代入すれば変形の方程式が得られる。
第(1)節(c)項で説明したようにテンソルは座標変換に対し不変であるから、テンソルで書かれたアインシュタイン方程式は必然的に
相対性原理を満足している。
(b)ニュートン近似/係数κの意味・重力場方程式
ニュートン力学は、弱い重力場(gμν = ημν+ hμν、|hμν|<<1 )で、
重力場が静的(∂gμν/μνt = 0 )、且つ速度が光速に比し十分遅い(4元位置ベクトル u=
(u0,u1,u2,u3)、4元速度ベクトル du/dτ= c(1,0,0,0)
ie 4元運動量ベクトル p =mc(1,0,0,0) )場合の力学であるから、
この条件下で、アインシュタイン方程式がどのように表されるかを考えよう。このことをニュートン近似と言う。
(式の誘導は説明が長くなるので、以下には要点のみ記す。)
①ニュートン近似での計量
ニュートン力学は、運動量 p = m v、重力ポテンシャルΦを使って表すと、(G:重力定数、M:総質量、r:距離、ρ:質量密度)
測地線方程式のパラメーターを時間 τ とすれば、運動量pを使って次の運動方程式が得られる。
この運動方程式をニュートン近似して、両者のFを比較すれば、計量g00が得られる。近似の条件から、dτ = (-g00)1/2cdt となり、
また所々で微小の条件を使って、
となるから、計量の時間成分 g00は、次のようになる。
②ニュートン近似による係数 κ の計算
アインシュタイン方程式 Rμν = κ( Tμν-1/2 gμν T )において、h00の2次の微小量を省略して、
となるから、①で得た h00 =-(1+2Φ/c2)を用い、更に ▽2Φ= 4πGρを使って、係数κは、次式で表される。
③ニュートン近似による重力場方程式
アインシュタイン方程式 Rμν = κ( Tμν-1/2 gμν T )において、ψμν=hμν-(1/2)ημνh
を導入し、∂ψμν/∂uμ =0 の条件を課すと、次式を得る。
<□=∂μ∂μ=-∂2/(cdt)2+∂2/(du1)2+∂2/(du2)2+∂2/(du3)2>
次に、微小な座標変換 uμ→uμ+λuμ(|hμν|<<1)を行うと、
従い、重力波による変動 hμν が、以下に示す h'μνとして表される。
また、この座標変換で、ψμνは、ψ'μν=ψμν-□λμ
に変換されるので、□λμ = 0 の条件の下、次に示す重力場の方程式を得る。
物質のない場合は、Tμν = 0 ゆえ、□ψμν = 0 であるが、∂νλν=0なる条件を付けると□ψμν = 0
は自動的に満足されので、ψ=ημνψμν = h/2 = 0 と置くと、ψμν = hμνとなる。このように、
物質のない場合の重力場の方程式は、ψに代わって h で論ずることができて、次式で表される。。(□=δμδν)
(c)一般相対性理論と局所慣性系
地球表面で、z軸の負方向を重力の方向すなわち鉛直方向にとると、質点の運動方程式は次式で表される。
左辺の m を慣性質量、右辺の m を重力質量という。この慣性質量と重力質量は同一であり、加速度によって生じる慣性力と重力は
原理的に区別できないというのが等価原理である。左辺と右辺の m は同一というのであるから、消去できて、
ここで、z軸方向に加速度 -g で移動する座標軸 z'を考えると、z'= z + 1/2gt2 + at + b すなわち
d2z'/d2=d2z/dt2 - g であるから、上式は次式で表される。
この加速度系でみれば、重力はなくなり、質点は加速度系で等速運動をすることになる。このことは式を使わずとも自由落下する
飛行機内では無重力状態になることから明らかであろう。この座標系のことを局所座標系(自由落下系、無重力系)という。
地球表面でこのような座標系がとれても、少し離れたところでは、g の方向が異なるので、そのままの座標系では今言ったことが
成立しなくなる。これら場所によって異なる局所座標系を関連づけられれば、統一的に無重力系としての運動方程式が得られることになる。
この関連づけを果たすのが、リーマン幾何学である。パラメータを時間 τ とする測地線方程式をもう一度書いてみよう。
この式を見れば、適当な座標系をとれば、接続係数とも言われるクリストフェル記号を0とすることができ、従い、
すなわち、局所的に常に重力のない慣性系を統一的に表すことが可能となる。
クリストフェル記号は、既に述べたようにテンソルではないため、特殊相対論での物理法則は、共変微分を用いて書き直さなければならい。
このことを共変的な形にするというが、共変的な形で表された物理法則は、加速度系を含む任意の座標系に対して同じ形で表されることになる。
この共変性の要請は一般相対性理論の重要な部分を占めることになる。
アインシュタイン方程式は見かけ上、極めてシンプルな形で表されているが、現実的には10次元連立方程式で解くことはほとんど 不可能であるが、特殊な条件下では解が得られており、その少ない解のうち有名な例を以下に示す。 これらの詳細は[一般相対性理論/ブラックホール・宇宙年齢張]をご覧ください。
問題を解く第一歩はは、考えている時空の計量テンソルの形を決めることに尽きる。
(c)シュワルシュルツ解
静的な時空で、球対称の物質(総質量:M)の外部の時空を考えると、不変量であるその線素が次のように表されるというのがシュワルシュルツ解と呼ばれる
ものである。
すなわち、a をシュワルシュルツ半径といい、 シュワルシュルツ半径の外部では我々の認識する空間であるが、内部では全く
異なる世界となることを意味する。光を考えれば、シュワルシュルツ半径内部に吸い込まれた光は外に出られないことになることを意味する。
ブラックホールとはこのシュワルシュルツ半径の球体のことである。
また、シュワルシュルツ解を出発点として、光の湾曲(重力レンズ)・水星の近日点移動などが解かれている。
(c)フリードマン方程式
宇宙を一様且つ等方的である、すなわち4次元空間における曲面の曲率(K)はどこも一定で、物質(宇宙全体質量密度:ρ)は一様に分布しているものとして、
宇宙の大きさ a が時間的にどのような変化をするかを考えた時、不変量であるその線素を次のように表す(宇宙の大きさ:a、曲率K)こと
から始まる。(以下で決まる計量テンソルをロバートソン・ウォーカーの計量という。)
または、
この式と、物質分布からくるエネルギーテンソルの式を組み合わせて次のような方程式が得られる。これをフリードマン方程式という。
この方程式を解くことにより、宇宙の膨張を論じることができるようになった。
| |
フーコー振り子 | |
ジャイロホイール | |
トムソンリング | |
まぼろしの壁 | |
回折 | |
電子雲 | |
月の軌道 | |
HR図 | |
霧箱・サイクロトロン | |
一般相対性理論概要 | |
素粒子標準理論概要 |